
AeroRigUI
2023
Actuated Tangible User Interfaces with Swarm Robotics on Ceiling Surfaces in Everyday Space
In Proc. ACM Conference on Human Factors in Computing Systems (CHI 2023)
![]()
In Proc. ACM Conference on Human Factors in Computing Systems (CHI 2023)

OVERVIEW
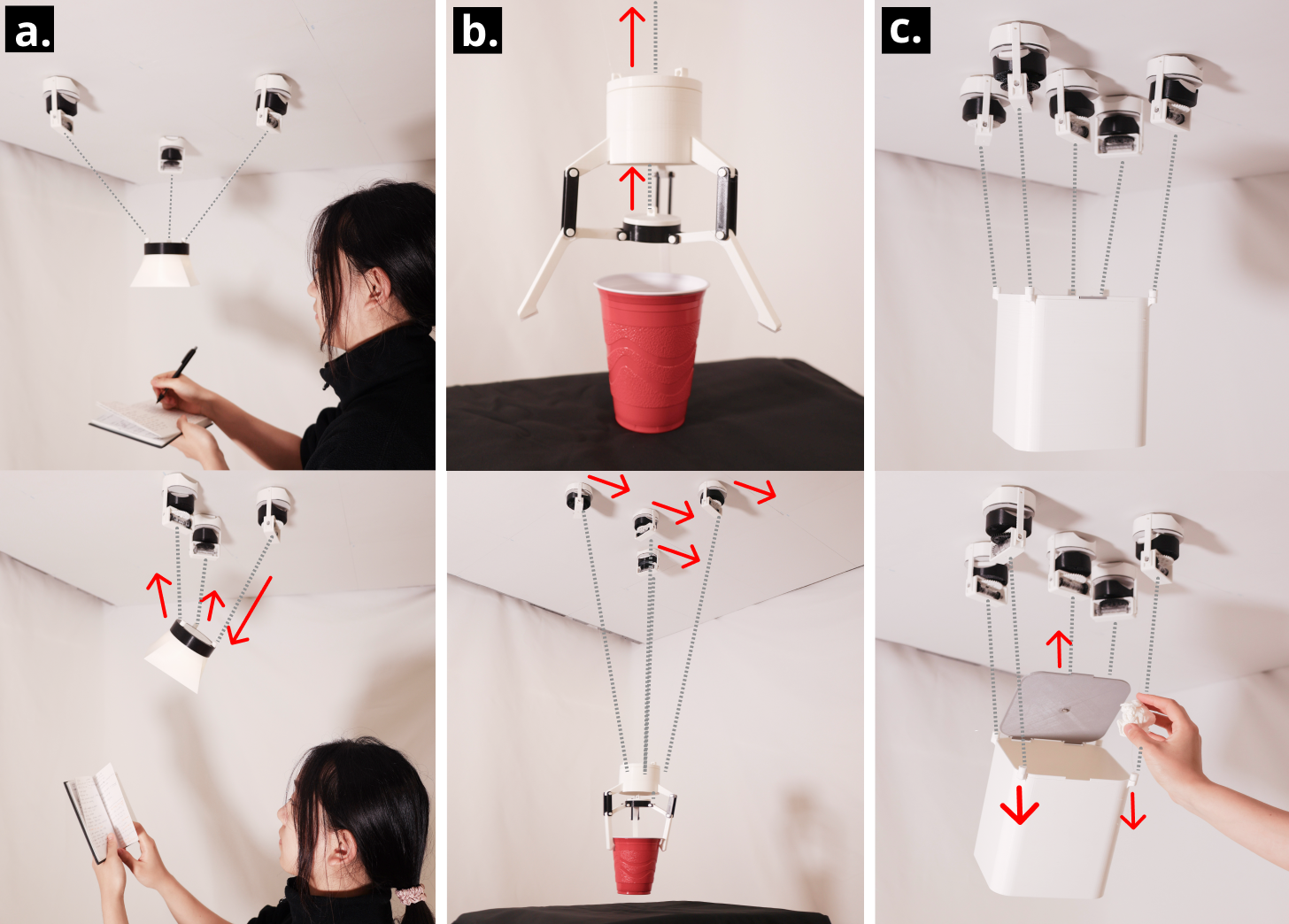
AeroRigUI is an actuated tangible user interface for 3D spatial and tangible interaction. Using strings controlled by self-propelled swarm robots with a reeling mechanism on ceiling surfaces, our approach enables rigging (control through strings) of physical objects’ position and orientation in the air. Inspired by rigging techniques in theater and stage performances, AeroRigUI takes advantage of string-based actuation for novel interaction design in 3D
space to create dynamic physical affordances, 6 DoF object control, 3D information display, and haptic interactions. Utilizing the
ceiling, an often underused area of the room, AeroRigUI can be applied for a range of applications such as room organization, data
physicalization, and animated expressions.
DESIGN SPACE

RIGBOT
We prototyped RigBots, which are self-propelled swarm robot modules that move along the aerial support stage and control the strings with their included reeling mechanism. Multiple RigBots can be controlled simultaneously, and they can move and rotate to control the string's location and length.
First Prototypes
![]()
![]()
![]()
![]() These are some initial prototypes of RigBot, developed between June - August 2022.
These are some initial prototypes of RigBot, developed between June - August 2022.
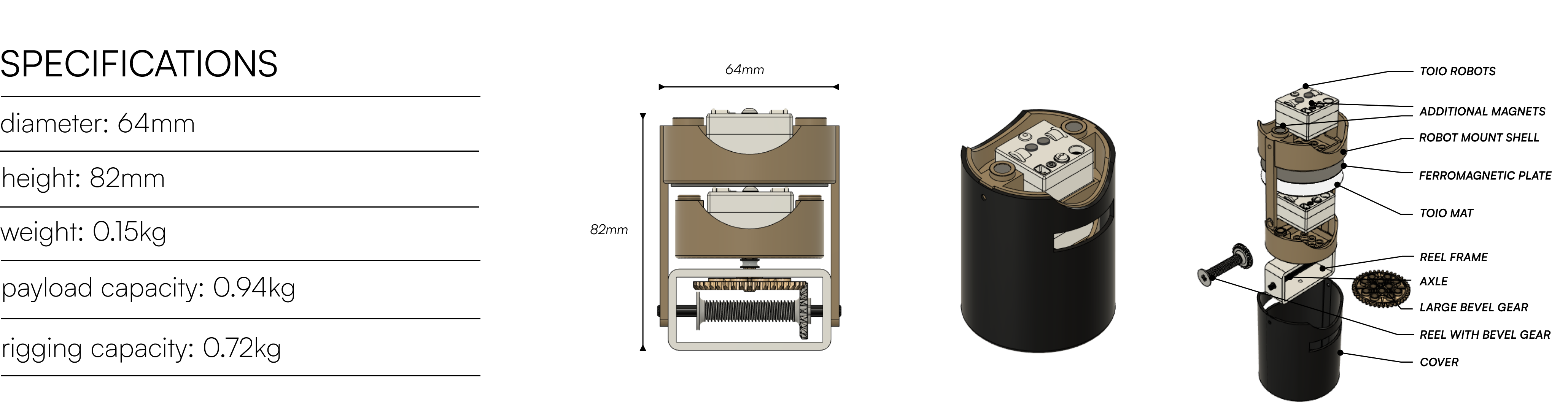
Final Prototype
![]()
![]()
Next Steps
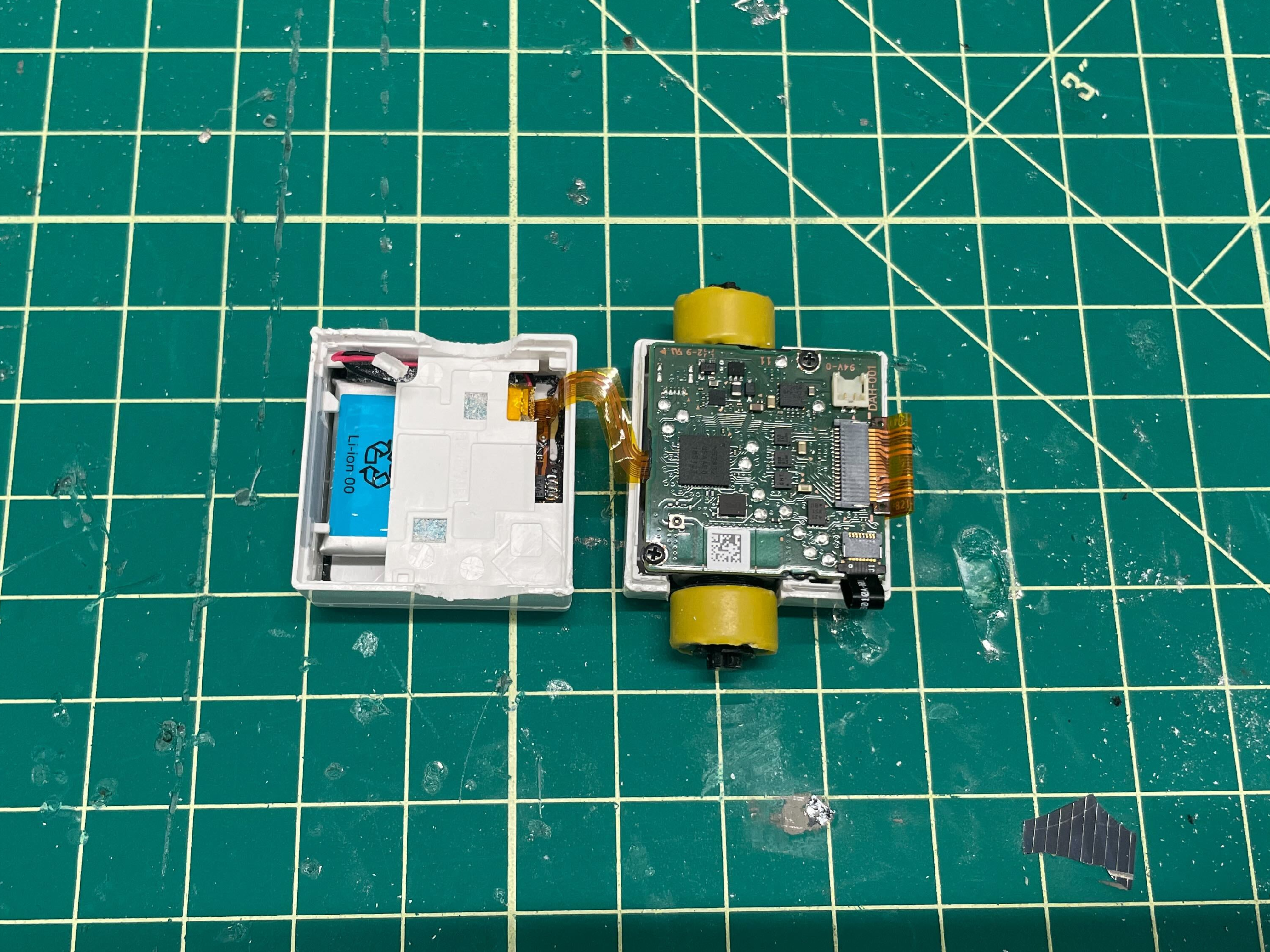
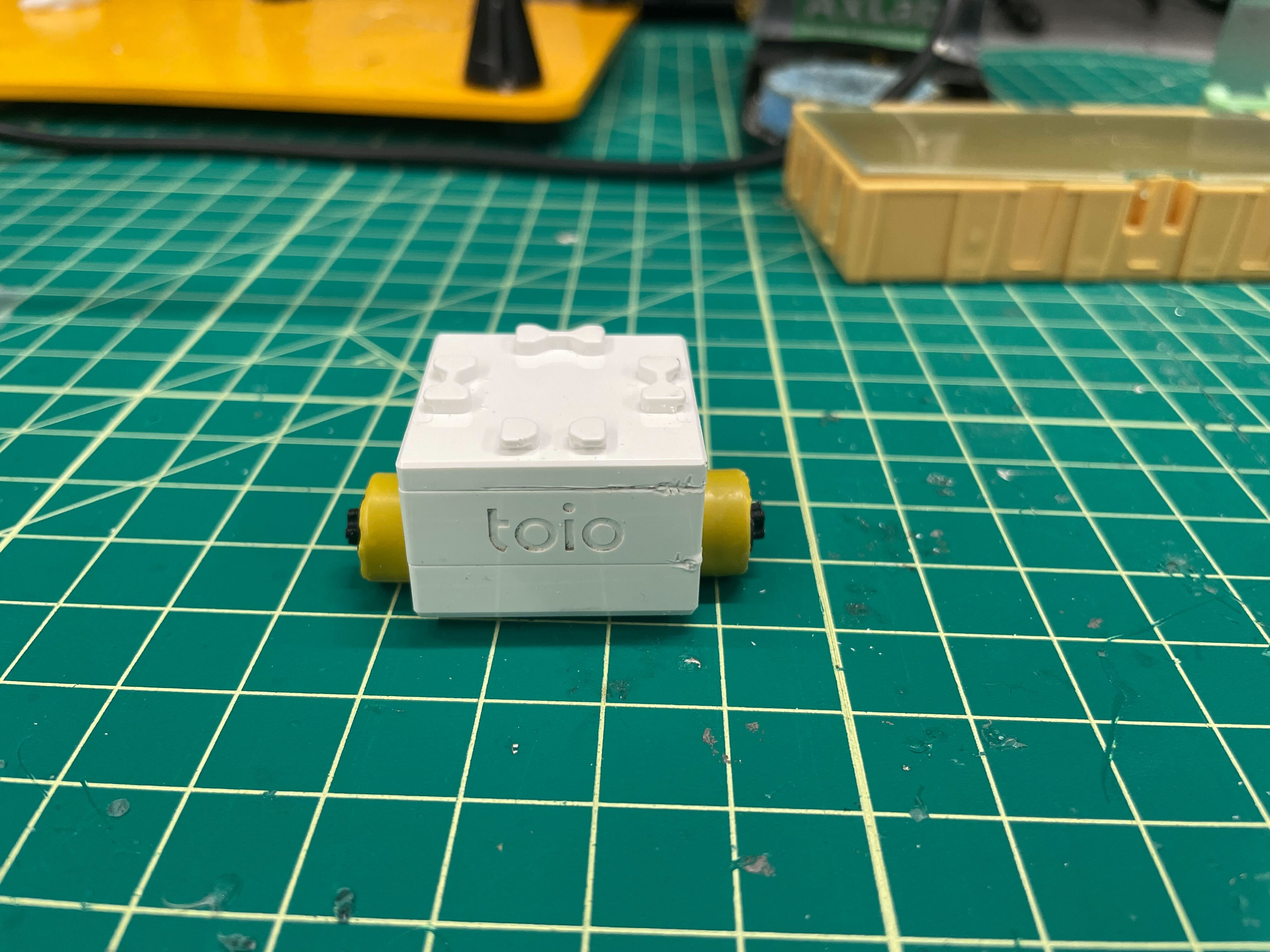
The current RigBot consists of toios robots, off-the-shelf robots developed by Sony, with mechanical shells to give its features. After we submitted the paper, I decided to disassemble the toio robot, and I added custom magnetic wheels to improve its stability and payload capacity.
![]()
![]()
![]()
My next goal is to make a smaller RigBot from scratch, starting with designing a custom-made PCB for it.




Final Prototype

Next Steps
The current RigBot consists of toios robots, off-the-shelf robots developed by Sony, with mechanical shells to give its features. After we submitted the paper, I decided to disassemble the toio robot, and I added custom magnetic wheels to improve its stability and payload capacity.

My next goal is to make a smaller RigBot from scratch, starting with designing a custom-made PCB for it.
USER WORKFLOW

ROBOT CONTROL PIPELINE
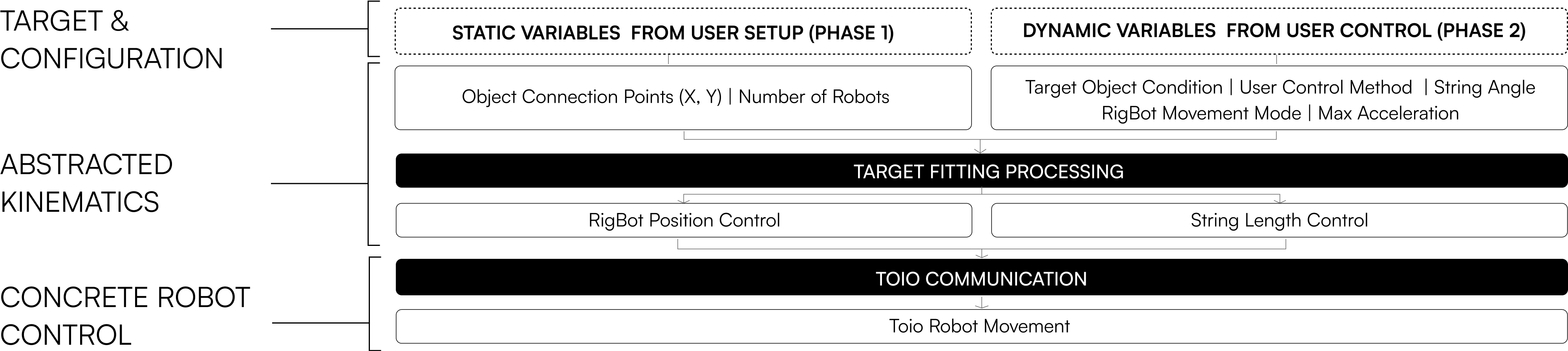
Click here to visit our GitHub repo for the robot control algorithm and user GUI! We invite you to use our work to design your own AeroRigUI system!
APPLICATION SCENARIOS
Room Organization

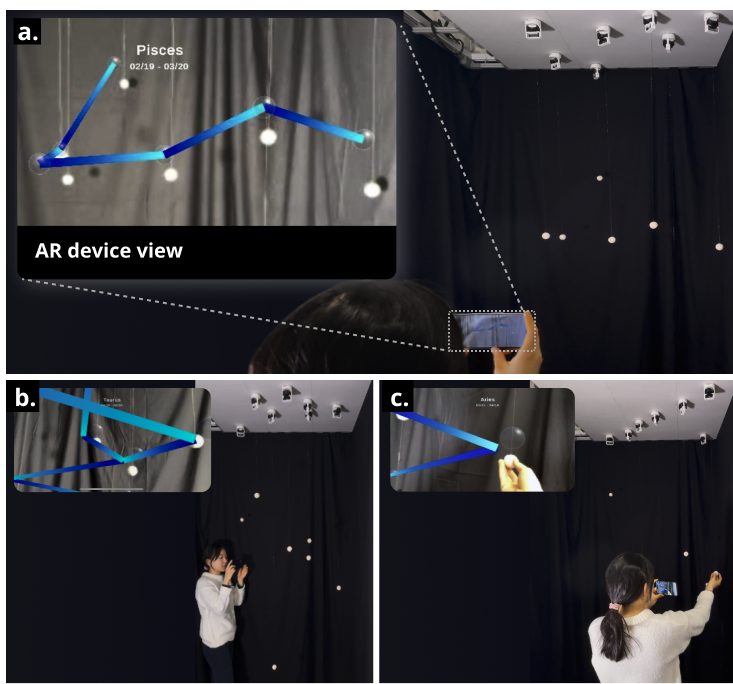
Data Physicalization

Animated Expression